
我们知道,在写裸机程序时,当我们完成硬件初始化的封装后,其初始化函数则需要在主函数中进行调用。当我们使用RT-Thread后,完全不需要这样做了,我们可以将硬件等自动初始化。RT-Thread 自动初始化机制是指初始化函数不需要被显式调用,只需要在函数定义处通过宏定义的方式进行申明,就会在系统启动过程中被执行。
7.1普通初始化
前面也讲了,我们在写单片机的程序时,需要对硬件进行初始化操作,我们这里还是以LED为例。需要对LED的GPIO 进行初始化后才能进一步操作。
int main(void)
{
rt_err_t rst;
/* LED 初始化 */
LED_GPIO_Config();
rst = rt_thread_init(&led_thread,
"ledshine",
led_thread_entry,
RT_NULL,
&led_thread_stack[0],
sizeof(led_thread_stack),
RT_THREAD_PRIORITY_MAX-2,
20);
if(rst == RT_EOK)
{
rt_thread_startup(&led_thread);
}
}这个很简单,在main()函数中对LED的GPIO进行了初始化,也就是调用了 ==LED_GPIO_Config()== 函数,而针对RT-Thread系统,我们在需要初始化的地方进行初始化即可,无需在main()函数或者board.c中初始化了。
7.2 RT-Thread初始化流程
要搞清楚RT-Thread的自动初始化流程,那么必须的了解RT-Thread初始化流程,这一部分前文也就有讲,官方也有,我们还是再来复习下。
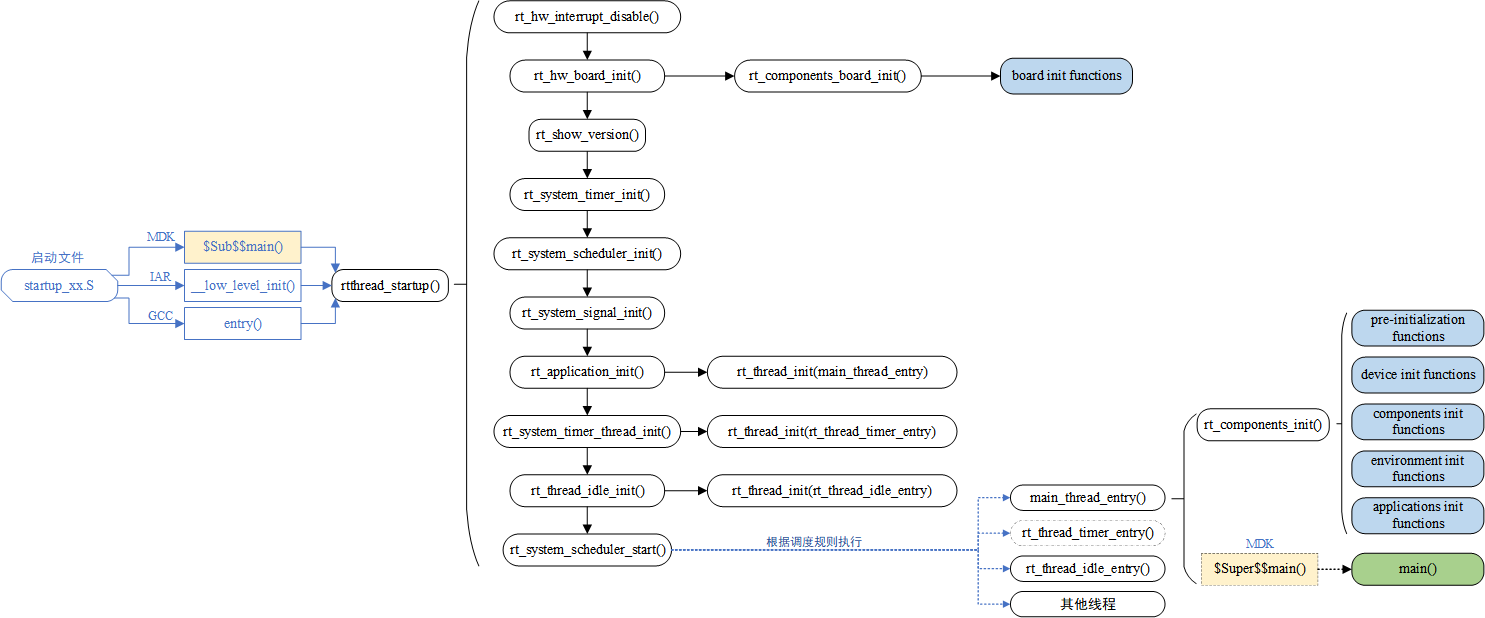
RT-Thread 支持多种平台和多种编译器。RT-Thread 启动代码统一入口为 rtthread_startup() ,芯片启动文件在完成必要工作(如初始化时钟、配置中断向量表、初始化堆栈等)后,跳转至 RT-Thread 的启动入口中,最后进入用户入口 main()。 RT-Thread 的启动流程如下:
1.全局关中断,初始化与系统相关的硬件。
2.打印系统版本信息,初始化系统内核对象(如定时器、调度器)。
3.初始化用户 main 线程(同时会初始化线程栈),在 main 线程中对各类模块依次进行初始化。
4.初始化软件定时器线程、初始化空闲线程。
5.启动调度器,系统切换到第一个线程开始运行(如 main 线程),并打开全局中断。
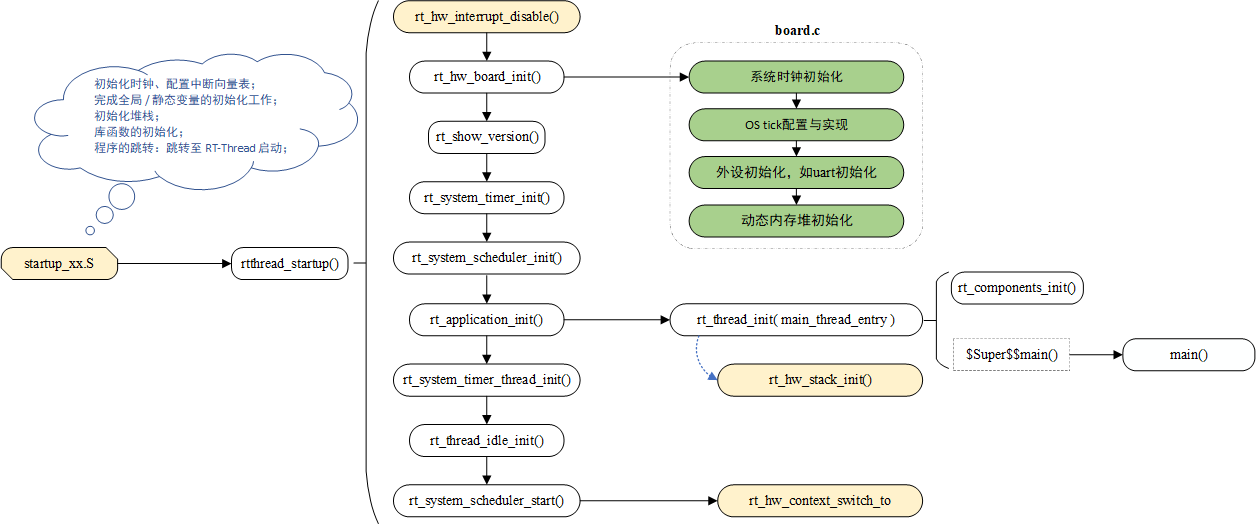
在图中标出颜色的部分需要用户特别注意(黄色表示 libcpu 移植相关的内容,绿色部分表示板级移植相关的内容)。
7.3 RT-Thread自动初始化原理
既然是初始化,我们这里中的重点关注初始化过程,重新整理RT-Thread初始化如下图所示:
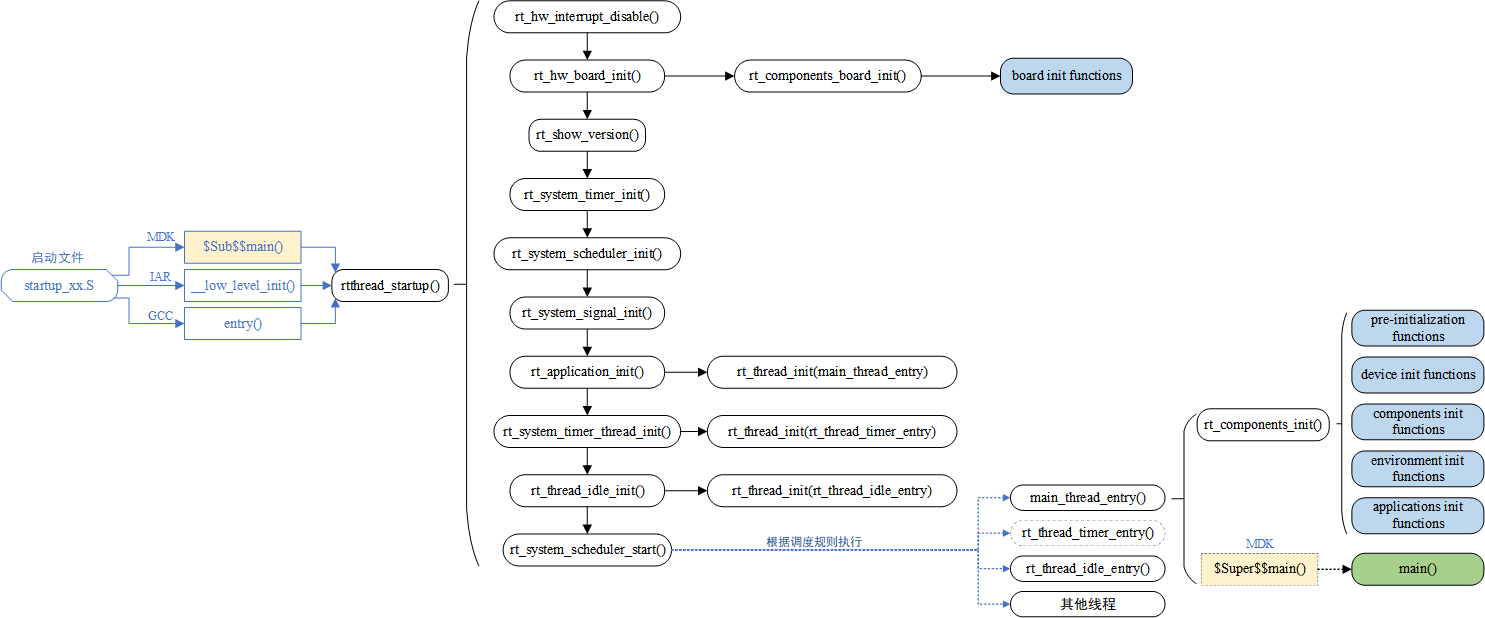
在系统启动流程图中,有两个函数:rt_components_board_init() 与 rt_components_init(),其后的带底色方框内部的函数表示被自动初始化的函数,其中:
“board init functions” 为所有通过 INIT_BOARD_EXPORT(fn) 申明的初始化函数。
“pre-initialization functions” 为所有通过 INIT_PREV_EXPORT(fn)申明的初始化函数。
“device init functions” 为所有通过 INIT_DEVICE_EXPORT(fn) 申明的初始化函数。
“components init functions” 为所有通过 INIT_COMPONENT_EXPORT(fn)申明的初始化函数。
“enviroment init functions” 为所有通过 INIT_ENV_EXPORT(fn) 申明的初始化函数。
“application init functions” 为所有通过 INIT_APP_EXPORT(fn)申明的初始化函数。
==rt_components_board_init()== 函数执行的比较早,主要初始化相关硬件环境,执行这个函数时将会遍历通过 INIT_BOARD_EXPORT(fn) 申明的初始化函数表,并调用各个函数。
==rt_components_init()== 函数会在操作系统运行起来之后创建的 main 线程里被调用执行,这个时候硬件环境和操作系统已经初始化完成,可以执行应用相关代码。rt_components_init() 函数会遍历通过剩下的其他几个宏申明的初始化函数表。
RT-Thread 的自动初始化机制使用了自定义 RTI 符号段,将需要在启动时进行初始化的函数指针放到了该段中,形成一张初始化函数表,在系统启动过程中会遍历该表,并调用表中的函数,达到自动初始化的目的。
自动初始化功能的宏接口定义详细描述如下表所示:
| 初始化顺序 | 宏接口 | 描述 |
|---|---|---|
| 1 | INIT_BOARD_EXPORT(fn) | 非常早期的初始化,此时调度器还未启动 |
| 2 | INIT_PREV_EXPORT(fn) | 主要是用于纯软件的初始化、没有太多依赖的函数 |
| 3 | INIT_DEVICE_EXPORT(fn) | 外设驱动初始化相关,比如网卡设备 |
| 4 | INIT_COMPONENT_EXPORT(fn) | 组件初始化,比如文件系统或者 LWIP |
| 5 | INIT_ENV_EXPORT(fn) | 系统环境初始化,比如挂载文件系统 |
| 6 | INIT_APP_EXPORT(fn) | 应用初始化,比如 GUI 应用 |
初始化函数主动通过这些宏接口进行申明,如 INIT_BOARD_EXPORT(rt_hw_usart_init),链接器会自动收集所有被申明的初始化函数,放到 RTI 符号段中,该符号段位于内存分布的 RO 段中,该 RTI 符号段中的所有函数在系统初始化时会被自动调用。
好了,介绍性文字我就不贴了,下面直接看源代码进一步分析。前文说过,在RT-Thread的启动流程中,调用了两个函数 rt_components_board_init() 与 rt_components_init() 就完成了上述6个部分的初始化工作。从初始化启动流程图中我们可以看出: rt_components_board_init() 完成了第 1 部分工作, rt_components_init() 完成了第2-6部分的工作。 那么接下来我们先看这两个函数源代码。
/**
* RT-Thread Components Initialization for board
*/
void rt_components_board_init(void)
{
#if RT_DEBUG_INIT
int result;
const struct rt_init_desc *desc;
for (desc = &__rt_init_desc_rti_board_start; desc < &__rt_init_desc_rti_board_end; desc ++)
{
rt_kprintf("initialize %s", desc->fn_name);
result = desc->fn();
rt_kprintf(":%d done\n", result);
}
#else
const init_fn_t *fn_ptr;
for (fn_ptr = &__rt_init_rti_board_start; fn_ptr < &__rt_init_rti_board_end; fn_ptr++)
{
(*fn_ptr)();
}
#endif
}
/**
* RT-Thread Components Initialization
*/
void rt_components_init(void)
{
#if RT_DEBUG_INIT
int result;
const struct rt_init_desc *desc;
rt_kprintf("do components initialization.\n");
for (desc = &__rt_init_desc_rti_board_end; desc < &__rt_init_desc_rti_end; desc ++)
{
rt_kprintf("initialize %s", desc->fn_name);
result = desc->fn();
rt_kprintf(":%d done\n", result);
}
#else
const init_fn_t *fn_ptr;
for (fn_ptr = &__rt_init_rti_board_end; fn_ptr < &__rt_init_rti_end; fn_ptr ++)
{
(*fn_ptr)();
}
#endif
}【注】rt_components_board_init() 与 rt_components_init()函数在components.c文件中实现。
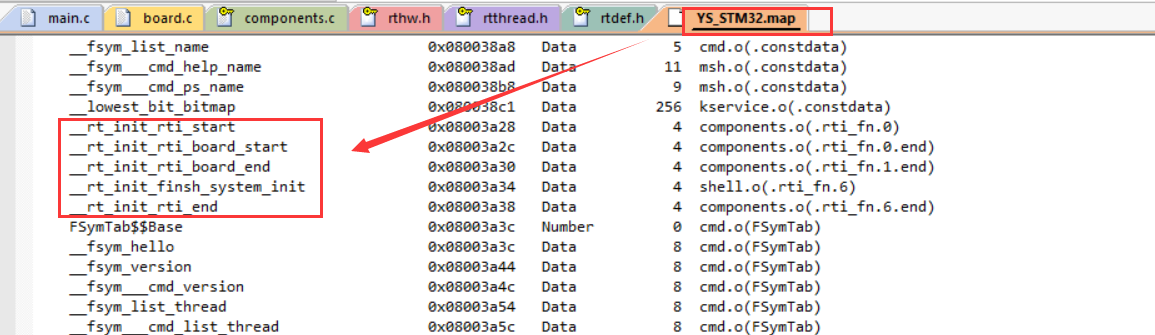
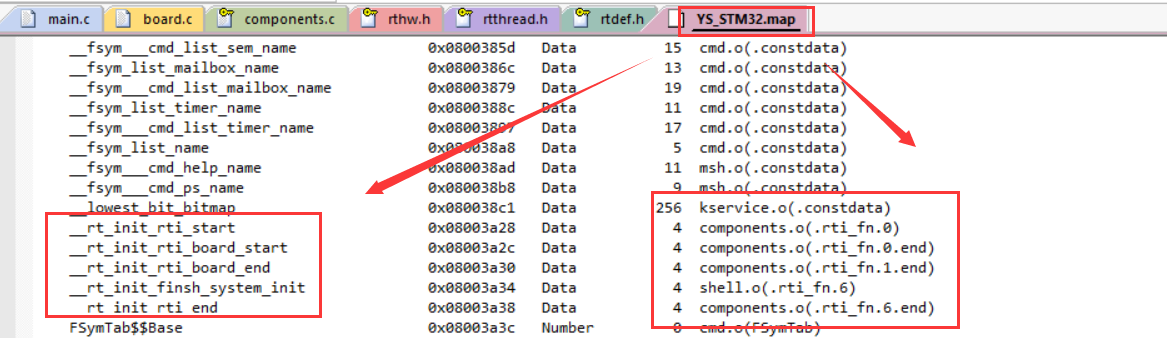
可以看到两个函数在非调试模式下都是通过for循环会遍历位于rt_init_rti_board_start 到 rt_init_rti_board_end 以及rt_init_rti_board_end 到 rt_init_rti_end之间保存的函数指针,然后依次执行这些函数。那么接下来我们看看上述函数指针。我们先编译下,找到.map文件,我们在在文件中搜索上述的函数指针。
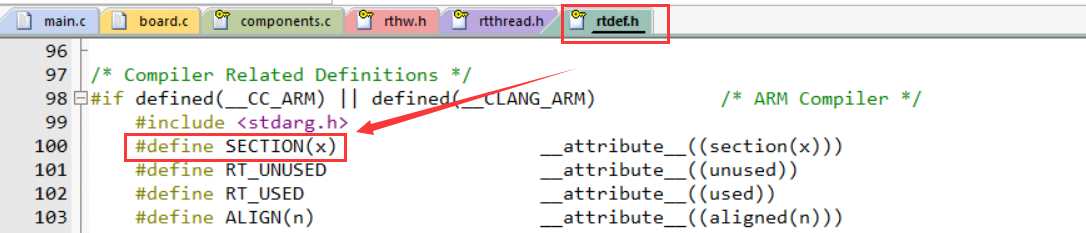
又问会问,找到又能怎样呢?怎么和上述的6个宏定义对应起来呢?不急哈,慢慢来,我们先找到上述6个宏定义又是如何实现的,找到啦,在rtdef.h中。
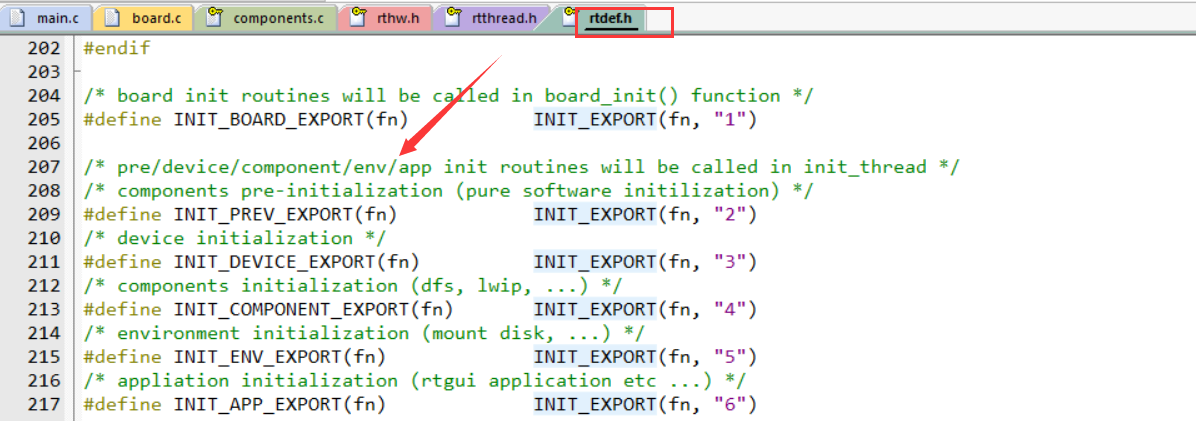
宏定义又是通过INIT_EXPORT宏函数定义的,那么INIT_EXPORT又是如何实现的呢?
#ifdef _MSC_VER /* we do not support MS VC++ compiler */
#define INIT_EXPORT(fn, level)
#else
#if RT_DEBUG_INIT
struct rt_init_desc
{
const char* fn_name;
const init_fn_t fn;
};
#define INIT_EXPORT(fn, level) \
const char __rti_##fn##_name[] = #fn; \
RT_USED const struct rt_init_desc __rt_init_desc_##fn SECTION(".rti_fn."level) = \
{ __rti_##fn##_name, fn};
#else
#define INIT_EXPORT(fn, level) \
RT_USED const init_fn_t __rt_init_##fn SECTION(".rti_fn."level) = fn
#endif
#endif【注】上述代码在rtdef.h中实现。
上述代码最关键的代码是:
RT_USED const init_fn_t __rt_init_##fn SECTION(".rti_fn."level) = fn这又是啥,看不懂啊,不急哈,我们先看看init_fn_t是啥?其定义如下:
#ifdef RT_USING_COMPONENTS_INIT
typedef int (*init_fn_t)(void);这就是一个函数指针类型,其实就是个指针。那么SECTION又是啥呢?其定义如下:
__ attribute__((used))表示这个标记这个东西是使用过的,避免出现如: warning: #177-D: variable "a" was declared but never referenced的警告。
在GCC的宏中,##后面跟变量名。__ attribute__((section(x)))则表示fn被放置于指定段中。是不是还是一头雾水,不急,我们再看看一些代码或许你就明白了。
/*
* Components Initialization will initialize some driver and components as following
* order:
* rti_start --> 0
* BOARD_EXPORT --> 1
* rti_board_end --> 1.end
*
* DEVICE_EXPORT --> 2
* COMPONENT_EXPORT --> 3
* FS_EXPORT --> 4
* ENV_EXPORT --> 5
* APP_EXPORT --> 6
*
* rti_end --> 6.end
*
* These automatically initialization, the driver or component initial function must
* be defined with:
* INIT_BOARD_EXPORT(fn);
* INIT_DEVICE_EXPORT(fn);
* ...
* INIT_APP_EXPORT(fn);
* etc.
*/
static int rti_start(void)
{
return 0;
}
INIT_EXPORT(rti_start, "0");
static int rti_board_start(void)
{
return 0;
}
INIT_EXPORT(rti_board_start, "0.end");
static int rti_board_end(void)
{
return 0;
}
INIT_EXPORT(rti_board_end, "1.end");
static int rti_end(void)
{
return 0;
}
INIT_EXPORT(rti_end, "6.end");【注】以上代码再在components.c文件中实现。
好了,我们结合上述代码和6个宏定义,以及.map文件。

上图中框选的第一行是一个Section,叫做.rti_fn.0,这个内容实际是我们通过INIT_EXPORT(rti_start, "0");完成的,我们把函数rti_start改名为__rt_init_rti_start,存入.rti_fn.0这个地方。同样的,INIT_EXPORT(rti_board_start, "0.end");、INIT_EXPORT(rti_board_end, "1.end");、INIT_EXPORT(rti_end, "6.end");也是这里插入的。
下图就是我们插入的位置。
这下是不是很明白,当然啦,多看几遍,还是很好理解的。
7.4 RT-Thread自动初始化实例
前文理论讲了很多,源代码也分析,估计初学者还很蒙,没关系,慢慢理解,我们先看个例子,先用起来,后面再慢慢理解。还会是LED的例子,前文已近给出了普通初始化话方式,下面我们看看如何使用自动化初始化。
/**
* @brief 初始化LED的GPIO
* @param None
* @retval None
*/
int LED_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED的外设时钟*/
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOG, ENABLE);
/*设置IO口*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //设置引脚模式为通用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚速率为50MHz
/*调用库函数,初始化GPIOB0*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //选择要控制的GPIOB引脚
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;/*选择要控制的引脚*/
GPIO_Init(GPIOG, &GPIO_InitStructure);
/* 开启所有led灯 */
GPIO_SetBits(GPIOB, GPIO_Pin_0);
GPIO_SetBits(GPIOG, GPIO_Pin_6|GPIO_Pin_7);
return 0;
}
/* LED 初始化 */
INIT_BOARD_EXPORT(LED_GPIO_Config); 我们注意最后一行代码,这里使用INIT_BOARD_EXPORT宏定义进行初始化,其初始化时间最早,值得注意的是,上述6个宏定义修饰的函数返回值都是int,最好将返回值改为int。
如果LED配置正确,其实验现象和普通初始化方式没有任何区别,接下来我们再来看看.map文件有何变化,当然我说的是自动初始化部分。
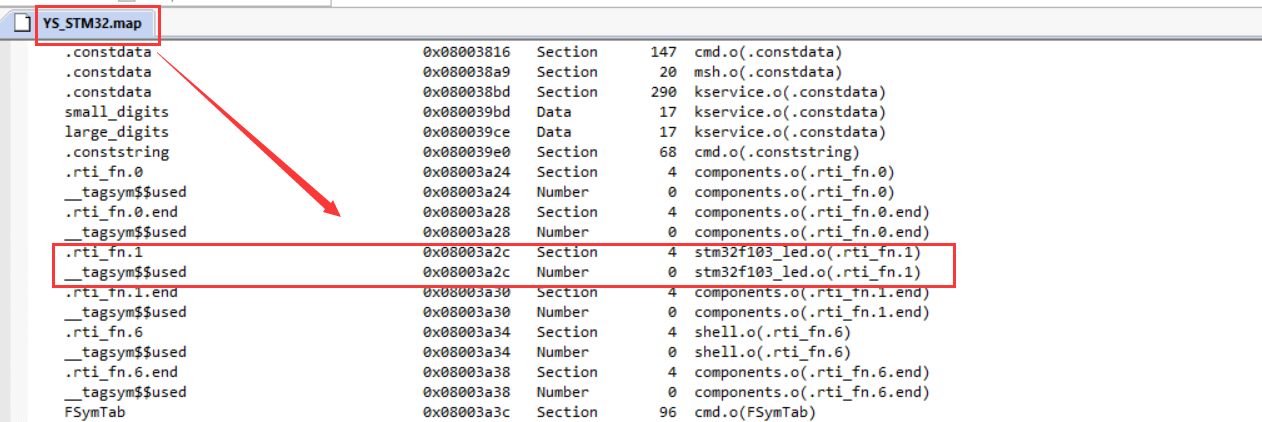
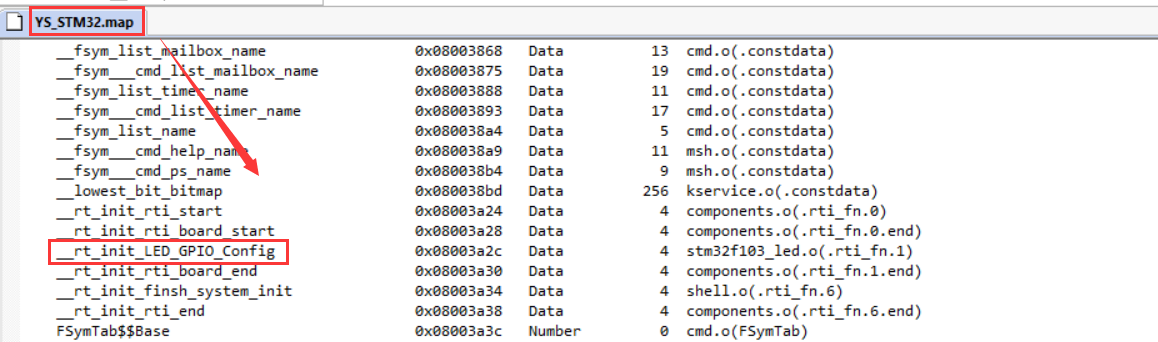
我们可以看到多了LED初始化的信息,也说明我们前文分析的是合理的。
7.5总结
好了,关于自动出初始化就讲完了,我估计初学者很蒙,没关系,我们再来总结下,还是先看看RT-Thread初始化过程,如下图所示:
rt_components_board_init() 与 rt_components_init()负责初始化,其中带底色方框内部的函数表示被自动初始化的函数。这部分应该没是啥问题。关键是如何将初始化函数和6个自动初始化宏定义联系起来这就有点烧脑子,我整理了一张关系图,如下图所示:
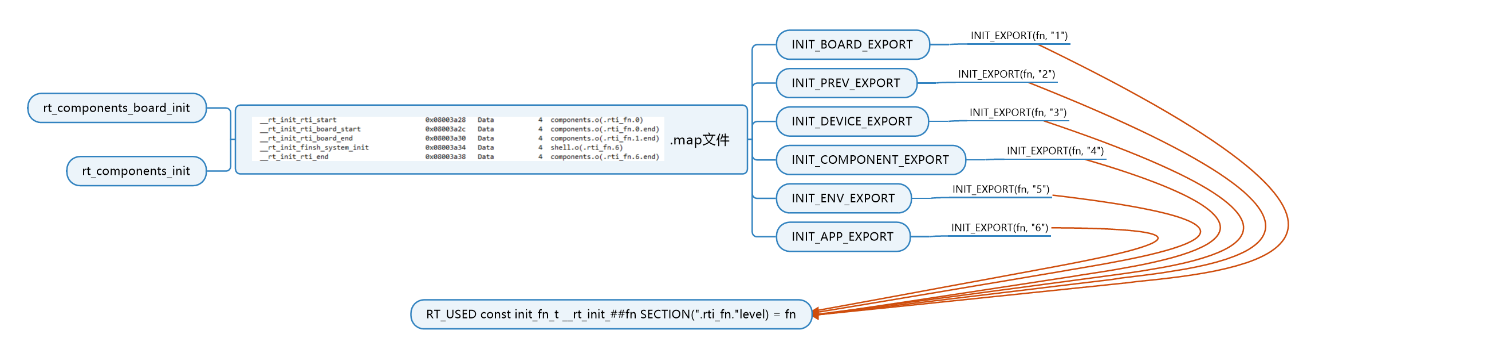
结合前文的讲解,再结合上述两张图,我不想在赘述了,自行理解去吧。
参考地址:
RT-Thread Nano移植原理
RT-Thread内核基础
代码获取方法
1.长按下面二维码,关注公众号[嵌入式实验楼]
2.在公众号回复关键词[RT-Thread]获取资料
